

Пример 12.1.Найдём массу части плоскости  , ограниченной координатными плоскостями, если плотность в каждой точке
, ограниченной координатными плоскостями, если плотность в каждой точке  .
.
Решение. Построим заданную часть плоскости  ( см. рис. 12.1). .
( см. рис. 12.1). .
Поверхность G однозначно проецируется на координатную плоскость XOY, поэтому для вычисления массы (12.5) применим формулу (12.1).
| Рисунок 5.1 |

 где
где  ,
,  .
.

Подставляем всё в подынтегральное выражение и вычисляем интеграл.
 .
.
Ответ:  .
.
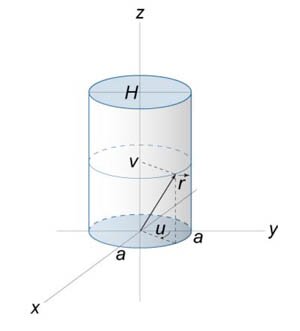
Пример 12.2. Вычислим координаты центра масс части поверхности полусферы  , вырезанной цилиндром
, вырезанной цилиндром  , если плотность
, если плотность  .
.
 Решение. Построим заданные поверхности и выделим нужную часть полусферы (на рис. 12.2 она выделена синим цветом). Поверхность удобно проецируется на плоскость
Решение. Построим заданные поверхности и выделим нужную часть полусферы (на рис. 12.2 она выделена синим цветом). Поверхность удобно проецируется на плоскость  в область, ограниченную окружностью .
в область, ограниченную окружностью .
| Рисунок 12.2 |
Используя формулы (12.5) и (12.1) составим интеграл для вычисления массы части поверхности.
 где .
где .

Вычислим частные производные.
 .
.
Упростим подкоренное выражение и получим интеграл 
Выберем способ его вычисления. В данном случае удобнее перейти к полярным координатам и учесть симметрию относительно оси  .
.
Составим повторный интеграл и вычислим его:
 .
.
Далее, по формулам (12.6) вычисляем координаты центра масс. С учётом симметрии поверхности и функции плотности, без вычисления определяем, что ордината центра масс равна нулю. Для двух других координат составляем интегралы и вычисляем их.
 .
.
 .
.
Ответ: С  .
.
Занятие 13. Понятие гладкой и кусочно-гладкой поверхности. Ориентированные поверхности и их ориентация. Нормаль к поверхности. Определение поверхностного интеграла второго рода, его свойства. Вычисление поверхностного интеграла второго рода с помощью двойного ин-теграла. Физический смысл поверхностного интеграла второго рода.ОЛ-1гл.6, ОЛ-2 гл.3, ОЛ-4§ 12.
Практика: ОЛ-6 №№ 2350, 2351 (№ 2351 решить двумя способами: 1) с помощью вычисления составных интегралов, 2) сведением к поверхностному интегралу 1-го рода) или: ОЛ-5 №№ 10.84, 85, 87, 94.
Домашнее задание к занятию 13:
ОЛ-6 № 2349 (решить двумя способами) или ОЛ-5 №№ 10.83, 86, 88.
Не нашли то, что искали? Воспользуйтесь поиском:
Лучшие изречения: Студент — человек, постоянно откладывающий неизбежность. 10578 —  | 7333 —
| 7333 —  или читать все.
или читать все.
78.85.5.224 © studopedia.ru Не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования. Есть нарушение авторского права? Напишите нам | Обратная связь.
Отключите adBlock!
и обновите страницу (F5)
очень нужно
Прежде, чем Вы начнёте скачивать свои варианты, попробуйте решить задачу по образцу, приведённому ниже для варианта 30.
        Вариант 1     Вариант 2     Вариант 3     Вариант 4     Вариант 5     Вариант 6
        Вариант 7     Вариант 8     Вариант 9     Вариант 10     Вариант 11     Вариант 12
        Вариант 13     Вариант 14     Вариант 15     Вариант 16     Вариант 17     Вариант 18
        Вариант 19     Вариант 20     Вариант 21     Вариант 22     Вариант 23     Вариант 24
        Вариант 25     Вариант 26     Вариант 27     Вариант 28     Вариант 29     Вариант 30
        16.30. Тело V задано ограничивающими его поверхностями,         — плотность. Найти массу тела.
    — плотность. Найти массу тела.
Центр масс и моменты инерции оболочки;
Сила притяжения и сила давления;
Поток жидкости и вещества через поверхность;
Электрический заряд, распределенный по поверхности;
Электрические поля (теорема Гаусса в электростатике).
Пусть распределение массы (m) в тонкой оболочке описывается непрерывной функцией плотности (mu left(
ight).) Координаты центра масс оболочки определяются формулами [ <
ight)dS> ,>;; <
ight)dS> ,>;; <
ight)dS> > ] − так называемые моменты первого порядка относительно координатных плоскостей (x = 0,) (y = 0) и (z = 0,) соответственно.
Моменты инерции оболочки относительно осей (Ox, Oy, Oz) выражаются, соответственно, формулами [ <
ight)mu left(
ight)dS> ,>;; <
ight)mu left(
ight)dS> ,>;; <
ight)mu left(
ight)dS> .> ] Моменты инерции оболочки относительно плоскостей (xy, yz, xz) определяются формулами [ <
ight)dS> ,>;; <
ight)dS> ,>;; <
ight)dS> .> ]
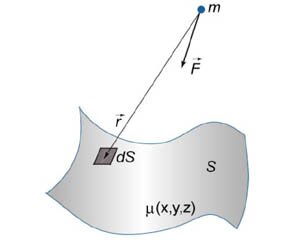
Сила притяжения между поверхностью (S) и точечным телом (m) определяется выражением [mathbf
ight)frac<mathbf
ight),) (G) − гравитационная постоянная, ( <mu left(
ight)>) − функция плотности.
Предположим, что поверхность (S) задана вектором (mathbf
ight),) находится с помощью поверхностного интеграла по формуле [mathbf
ight)dmathbf> .] Давление, по определению, действует в направлении вектора нормали к поверхности (S) в каждой точке. Поэтому, мы можем записать [mathbf
ight)dmathbf> = iintlimits_S
Если в качестве векторного поля рассматривается скорость жидкости (mathbf
ight),) то поток через поверхность (S) называется потоком жидкости . Он равен объему жидкости, проходящей через поверхность (S) в единицу времени и выражается формулой [Phi = iintlimits_S <mathbf
ight) cdot dmathbf> .] Аналогично, поток векторного поля (mathbf
ho mathbf
ho) − плотность, называется потоком вещества и определяется выражением [Phi = iintlimits_S <
ho mathbf
ight) cdot dmathbf> .] Он численно равен массе вещества, проходящего через поверхность (S) в единицу времени.
Поток электрического смещения (mathbf> = sumlimits_i <
Теорема Гаусса применима к любым замкнутым поверхностям. В случае поверхности с достаточной симметрией, данная теорема упрощает вычисление электрического поля. Теорему Гаусса рассматривают как один из основных постулатов теории электричества. Она входит в систему основных уравнений Максвелла.
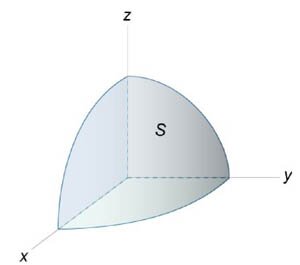
Вычислим момент первого порядка (
ight)dS> > = <<mu _0>iintlimits_S
ight)> <1 + <
ight)>^2> + <<left( <frac<<partial z>><<partial y>>>
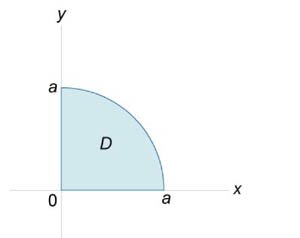
ight)>^2>> dxdy> ,> ] где проекция (
ight)>) поверхности на плоскость (xy) представляет собой часть круга, лежащую в первом квадранте (рисунок (4)).
Итак, координаты центра масс оболочки имеют вид [left( <
ight) = left( <frac<2>,frac<2>,frac<2>>
ight).]
Момент инерции (
ight)mu left(
ight)dS> > = <<mu _0>iintlimits_S <left( <+ >
ight)dS> ,> ] где поверхность (S) − это полусфера ( + + = 1;left(
ight).)
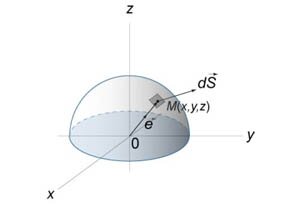
Рассмотрим точку (Mleft(
ight)) полусферы, которая принадлежит малому участку поверхности (dS) (рисунок (5)). Силу притяжения (dmathbf
ight)) между элементом поверхности (dS) и массой (m) можно записать в виде [dmathbf
ight) = frac<mdS>><<>>mathbf
ight),] где (G) − гравитационная постоянная, (mathbf
ight)) − единичный вектор, направленный из точки (O) в точку (M.)
Так как (mathbf
ight) = left( <largefrac
ormalsize, largefrac
ormalsize, largefrac
ormalsize>
ight),) то можно записать [dmathbf
ight) = frac<mdS>><<>>left(
ight).] После интегрирования по поверхности полусферы получаем следующие выражения для компонентов силы притяжения: [ <
ight) > = + rsin psi sin heta cdot mathbf
ormalsize.)
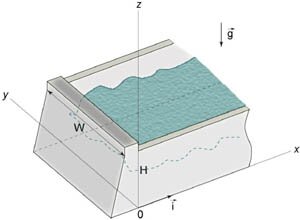
В условиях гидростатического равновесия давление на поверхность дамбы зависит от координаты (z) в соответствии с формулой [pleft( z
ight) =
ho gleft(
ight),] где (
ho) − плотность воды, (g) − ускорение свободного падения.
Полная сила давления, действующая на плотину, будет равна [ <mathbf
ho gleft(
ight) cdot left( < — mathbf>
ight)dydz> > > = <
ho gWleft( < — mathbf>
ight)left[ <left. <left(
ight)>
ight|_0^H>
ight] > = <frac<<
ho gW>><2>left( < — mathbf
ight).> ] Вектор (left( < — mathbf>
ight)) показывает направление действия силы (mathbf
ight| = frac<<
ho gW>><2>.]
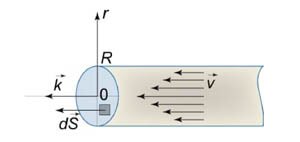
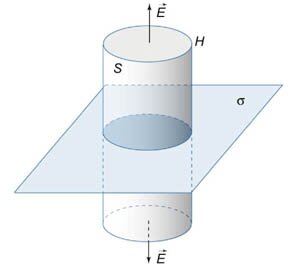
В силу симметрии системы вектор напряженности электрического поля должен быть перпендикулярен поверхности, а величина напряженности должна быть одинакова во всех точках, равноудаленных от пластины.
Рассмотрим условную гауссовскую поверхность в форме цилиндра с поперечным сечением (S) и высотой (2H) (рисунок (8)). Поток электрического смещения отличен от нуля лишь на основаниях цилиндра. Следовательно, (Phi = 2<varepsilon _0>ES,) где (E) − электрическое поле в основаниях цилиндра. Полный заряд внутри цилиндрической поверхности равен (Q = sigma S.) Тогда по теореме Гаусса получаем [ <Phi = <varepsilon _0>iintlimits_S