


Популярные вопросы
SKR v1.3 проблемы подключения к компу
Доброго времени суток!
Хотел первый свой пост написать о том как собрал свой принтер, но пришлось начинать с проблемы.
Стоит ли брать AnyCubic Kossel Linear Plus ? Интересует качество стоковых компонентов
а) нужен не шибко большой принтер для мелочевки. детали, в основном, не больше 10 см по XY, для больше есть другой принтер
Зачем используют слово ‘3D’ при описании аддитивных технологий?
Ответы
А если я подключу вместо амперметра резистор, скажем, на 0.1 Ома, возьму осциллограф и заставлю крутится двигатель. По максимальной амплитуде напряжения на резисторе высчитаю ток. Только вот момент в другом у шагового двигателя 2 обмотки по 2.8 А каждая, они в полношаговом режиме работают поочереди, то есть в один момент времени ток на двигатель идёт только на одну из обмоток. А вот в режиме 1/2 шага совсем другое, там согласно диаграмме в зависимости от момента времени питаются обе обмотки таким образом что на выходе ток варируется от 100% до 71+71% (на каждой по 71%). Как в этом случае?
Драйвер управляет током обмоток двигателя. Вы выставляете этот ток подстроечным резистором. Т.к. драйвер регулирует ток, то работа двигателя не зависит от входного напряжения. А ток на входе, где Вы его измеряете зависит от потребляемой мощности мотором и напряжения на входе драйвера.
Драйвер с мотором будет потреблять суммарную мощность = мощность потребляемая двигателем + потри на драйвере (примерно 15% от мощности двигателя)
Да Вы что. Как же так работа двигателя не зависит от входного напряжения. А разве не напряжение ограничивает крутящий момент на высоких оборотах.
Двигателем драйвер управляет. И если на входе драйвера напряжение выше минимального, то не зависит, т.к. дравер регулирует ток обмоток двигателя.
По закону коммутации я знаю что при увеличении частоты на индуктивности (а обмотка двигателя имеет индуктивность) реактивное сопротисление увеличивается. То есть чем выше напряжение тем больше крутящего момента на высоких оборотах.
Работа двигателя мало зависит от входного напряжения так как драйвер представляет собой импульсный источник тока . Чем выше напряжение, тем бОльший ток сможет выдать драйвер и больший момент. Но тут все зависит от выставленного тока на драйвере, и возможно что на 12 вольтах результат будет достоточен.
Откройте даташит, посмотрите требуемую обаязку (наверно ключевыми моментами будут шунты для измерения тока). Подставьте в формулу из даташита. Заодно убедитесь не врет ли вам шкала.
Смотрел, но здесь другой момент. На плате драйвера есть 3 резистора в паралель. Их общее сопротивление порядком 0.3-0.4 Ома, точнее померять не могу. Как померять точно до 1 Ома?
до одного Ома Вы уже добились, если до 0.1 Ома или меньше
выпаивать и замерять
брать Ом метр с соответствующими пределами и погрешностями,
можете также по закону Ома посчитать, прибор опять нужен точный
замерить с помощью моста
но температура при пайке может опять увести сопротивление
можете по номиналам написанным на сопротивлениях посчитать, тут уже отклонение сопротивления при производстве
Проще посмотреть маркировку установленных резисторов и вычислить общее сопротивление.
‘Проще посмотреть маркировку установленных резисторов и вычислить общее сопротивление.’ Та вот не проще, на резисторах написано R620 это обозначает что его сопротивление 62 Ома, а если 3 резистора в паралель то общее сопротивление 62/3=20.666. Ом, а этого не может быть. Где то в схеме есть ещё сопротивление которого я не вижу.
R620 означат что они 0,620 Ома, а подключая три параллельно получаем 0.2067 Ома
Аааааа. Вот оно как.
Видите как у меня меряет Омметр?
Значит мне нужно:
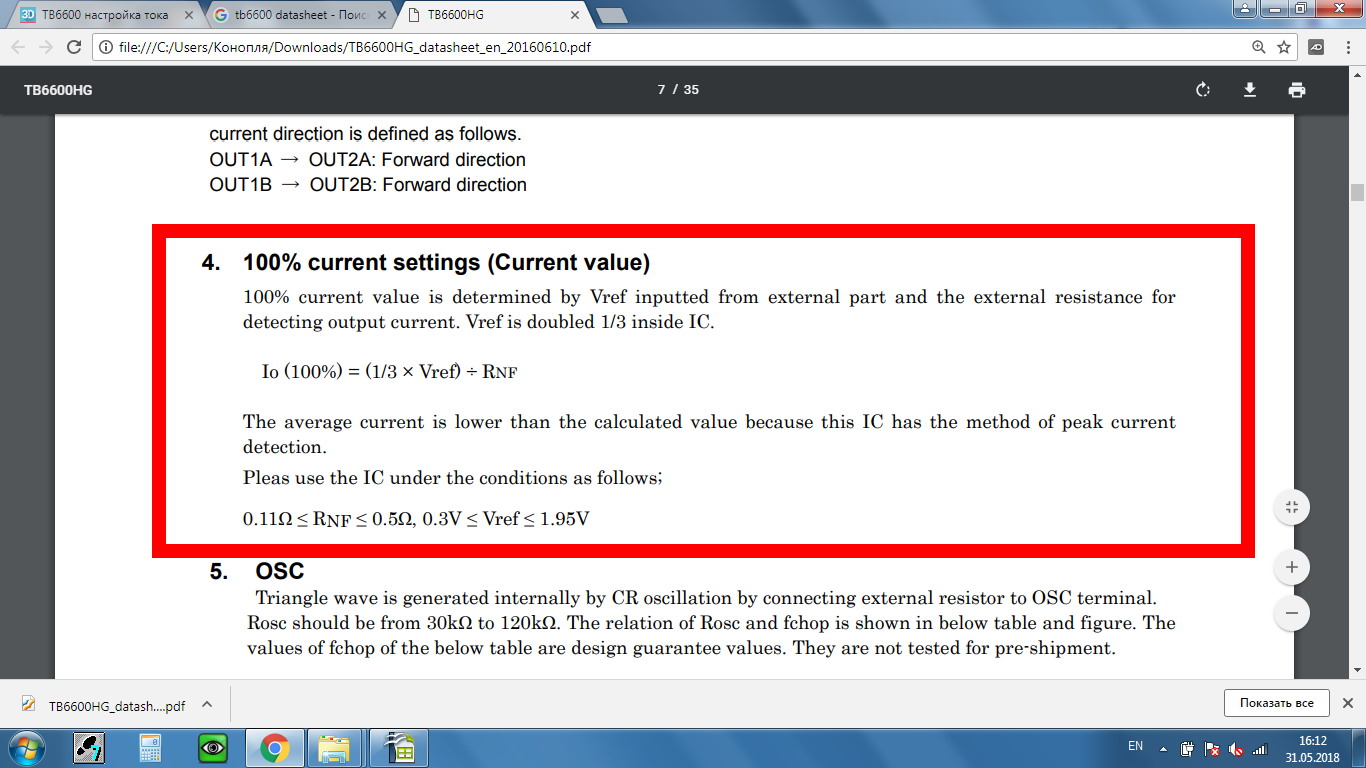
2.8А = (1/3*Х)/0.2 Ом
1/3*Х = 2.8 А * 0.2 Ом
1/3*Х = 0.14
Х = 0.14/ (1/3)
Х = 0.42 В
Что и требовалось рассчитать.
а Вы наверное сопротивлением щупов пренебрегаете, а может и погрешность прибора большая
Сопротивление щупов я отнял, скорее погрешность прибора такая.
Поздно наверно, но чего черновику то пропадать.
Вы их выпаивали когда измеряли? Если нет то на схему могло влиять все что угодно. На них сопротивление разве не написано (код)?
Теперь смотрим на datasheet:
https://toshiba.semicon-storage.com/info/docget.jsp?d > Резисторы обозначенные как Nfa и Nfb (11 и 15 контакты) это как раз те самы шунты, при помощи которых измеряется ток. Теперь смотрите на алгоритм:
1) выяснить сопротивление этих резисторов (у них должен быть код). Но это в случае если они исправны и выдают верное сопротивление. Измерять прямо в схеме не рекомендую ибо на этот процесс будкт влиять все что подключено в схеме (драйвере). Запомните измеренные значения.
2) подайте напряжение на драйвер
3) измерье напряжениена пине vref (пин 5 драйвера)
4) открыть страницу 7 упомянутого даташита и найдите там формулу с рассчетом тока.
5) подставьте в формулу vref и R. Так мы получим максимальный ток который может отдать драйвер двигателю.
У измерительной техники также есть некоторые требования к эксплуатации, поэтому они могут врать, если вы их не верно используете (погрешность метода измерения добавляется к огрпшности самого средства измерения. Тут ток имеет пульсирующих характер это раз, а два — ток меняется на разных обнотках в зависимости от положения двигателя. Амперметр бытовой,скорее всего, получает выборку значений ( причем, медленнее чем частота пульсаций тока) и по этой выборке проводит усреднение. В целом это не плохой вариант измерения тока фазы, но только тогда, когда ток не изменяется во времени (двигатель в режиме удержания и в нулевой позиции, так как в разных позициях ток может быть в в промежутках от 100% до 0%
Для написания комментариев, пожалуйста, авторизуйтесь.

Содержание
Введение:
Основанная на чипе TB6600HG новая модель драйвера BL-TB6600-V1.2 пришла на замену популярному драйверу BL-TB6560-V2.0.
Этот драйвер-контроллер подойдет для построения не только любительских систем ЧПУ, но и профессиональных, основаных на двигателях высокой мощности. Если сравнивать с предыдущим поколением драйвера TB6560AHG, то выходная мощность у TB6600HG возросла до 200Вт (как видим практическое удвоение по значению мощности), рабочее напряжение поднято с 35В (TB6560AHG) до 50В, рабочий ток увеличен до 4.5А (5А пиковое значение).
Увеличена максимальная рабочая частота.
Добавлены схемы защиты.
К основной "вкусности" данного драйвера можно отнести интеллектуальное управление током и использование ШИМ моделяции, благодаря чему есть возможность подключать к драйверу шаговые двигатели любого напряжения питания и тока — на установленном уровне микросхема сама ограничит максимальный ток.
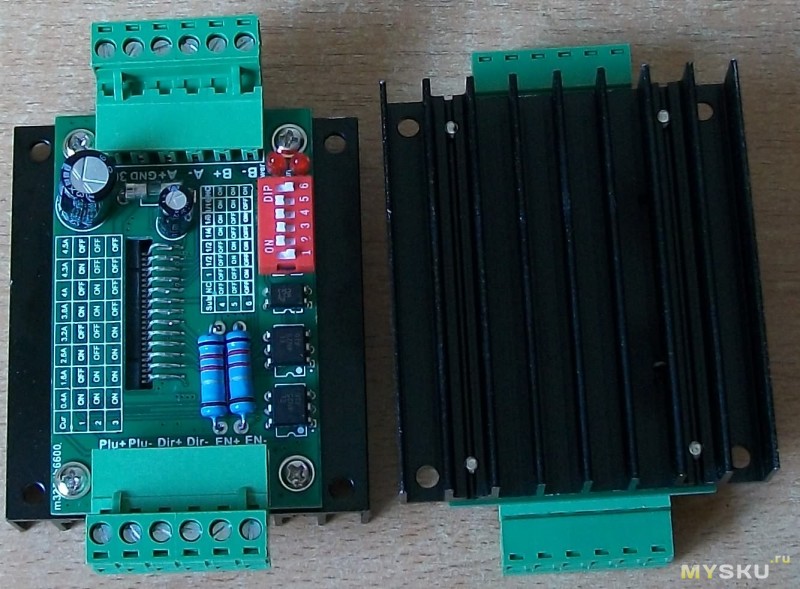
Внешний вид:




| Свойства | Параметры |
|---|---|
| Входное напряжение силовой части | от 8В до 50В постоянного напряжения (36В рекомендуется) |
| Выходной ток | от 0.3А до 4.5А (пиковое значение 5А) |
| Микрошаг | 1 .. 2 .. 8 .. 16 |
| Максимальная частота ШИМ | 200кГц |
| Регулировки максимального тока ШД | 1.1А .. 2.2А .. 3.3А .. 4.5А |
| Регулировки тока удержания | 50% или 100% |
| Температура эксплуатации | от -10 до +45° С |
| Размеры | 80мм*50мм*35мм |
| Вес | 118.3г |
Описание:
Конструктивно драйвер изготовлен с возможностью монтажа в корпус и подключением контактных площадок быстроразъемным способом. Что упрощает его установку, эксплуатацию и замену в случае выхода из строя. Подключение производится по следующей таблице:
| Маркировка | Описание |
|---|---|
| 24V+ | Положительный контакт для подключения блока питания (питания шагового двигателя) постоянное напряжение |
| GND | Отрицательный контакты для подключения блока питания (питания шагового двигателя) постоянное напряжение |
| CLK- | Вход для шаговых импульсов STEP (рабочим является передний фронт, длительность > 10мкс) |
| CW- | Вход для управления направлением вращения вала шагового двигателя (DIR) |
| EN- | Вход для включения/выключения шагового двигателя (ENABLE) |
| +5V | Общий сигнальный провод |
| A+,A- | Контакты для подключения I фазной обмотки шагового двигателя |
| B+,B- | Контакты для подключения II фазной обмотки шагового двигателя |
Схемы подключения:
Подключения драйвера к плате коммутации или просто контроллеру осуществляется двумя способами, которые зависят от схемотехнического исполнения и конфигурации портов контроллера.
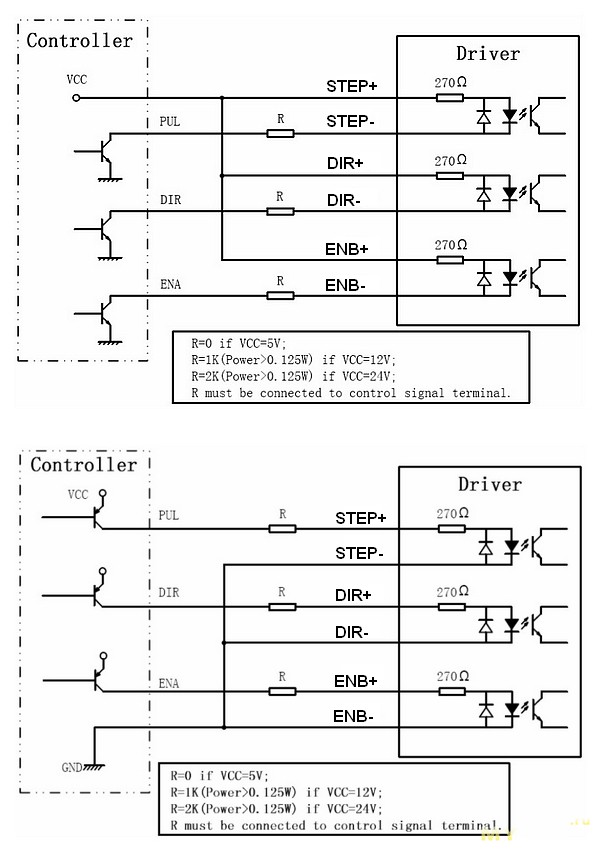
Пример подключения драйвера к контроллеру на NPN ключах с открытым коллектором

Пример подключения драйвера к контроллеру на PNP ключах с открытым коллектором

Примечание:
Значение сопротивлений R_CLK, R_CW, R_EN зависят от напряжения питания VCC:
- При VCC = 5В, R_CLK = R_CW = R_EN = 0;
- При VCC = 12В, R_CLK = R_CW = 1кОм, R_EN = 1.5кОм;
- При VCC = 24В, R_CLK = R_CW = 2кОм, R_EN = 3кОм;
Подключение драйвера BL-TB6600-v1.2 к плате BL-MACH-V1.1:

Более подробно о интерфейсной плате BL-MACH-V1.1 можно узнать по ссылке Плата коммутационная (контроллер) BL-MACH-V1.1
СТАТЬЯ В ПРОЦЕССЕ НАПИСАНИЯ
Обновлено: 30.12.2017

- Цена: US $8.89
- Перейти в магазин
Опять я, к вам со своими обзорами, по ЧПУ.
Ну мало ли, может кому и интересно будет, про ЧПУ строение.
Для начала кто не знает, или просто знает такие слова, как контролер, драйвер и опторазвязка. В чем их отличие?
Контролер, есть универсальный, на несколько осей, обычно под небольшие токи, на нем и опторазвязку обычно ставят, релюхи всякие и т.д. и т.п.
Универсальный стоит подороже и если что полетит, то трудней причину искать будет.
Есть более простой контролер, там отсутствуют драйвера. Так как двигатели могут разной мощности быть, ну и под них разные драйвера. Так же на осях различных могут шаговые движки разные стоять. На разный ток.
То есть драйвер. самый нам нужный, чтобы ШД управлять. Там обычно перемычками, переключателями мы и выставляем ток и микрошаг для ШД.
Сейчас драйвера идут почти сплошь, уже с оптронами, то есть с опторазвязкой.
Но кто не знает, по привычке покупает, контролер с опторазвязкой на нем, а к ним уже драйвера подключает.
Я тоже кстати сглупил, заказал такой. Он по хорошему не сильно то и нужен.
Раб. поле я свое знаю, поэтому детали сразу под него разрабатываю. Конечники не сильно и нужны. Включение шпинделя, мне тоже как то не нужно.
Кто его знает, глюканет там контролер и пока я фрезу на мощном фрезере меняю, он возьмет и включится. Пальцы как с куста, улетят.
В общем теории немного, вам дал. Еще немного схемотехники по подключению драйверов на порты.
Есть 2 такие основные схемы подключения.
Китайцы в основном как один первую советуют. Но она не всегда срабатывает.
Я уже писал обзор покупки TB6600, а на самом деле там оказалась TB67S109AFTG. Микруха намного мелкоскопичней чем первая.
И по даташиту вроде как более слабая по току.
Обзор мой здесь mysku.ru/blog/aliexpress/41551.html
Там подробно вроде всё обсудили. Поэтому после него я опять заказал драйвера на TB6600, где уже наглядно на фото видно, что стоит именно эта микруха.
Также выбирал, чтобы ток перемеником не накручивать, а то ошибка и спалить можно. Так как есть и такого исполнения, они немного подешевле будут.
А есть закрытого типа, они подороже. Ну и радиатор там помощней.
В общем описываю, что я заказал и получил.
Продавец хороший, быстро отправил и через пару недель, получил на почте, хотя вроде по деньгам и недорого. Был нормальный трек, который всю дорогу бился.
Границу как по маслу проскочил, а также таможню Екатеринбург. Даже удивительно, обычно там «черная яма». Видно от трека зависит.
Пришло в сером пакете, хорошо замотанным скотчем, упаковкой с пупырушками и сами драйвера в картонных коробках, без всяких надписей. Картон хороший. 
Сами драйвера, неплохо выполненные. Пайка приличная. Емкость немного кривовато стояло на одном. Не стал выправлять.
Термопасты под TB6600 тоже не пожалели, даже с лишком, ваткой лишнее убрал с боков.
Для любителей рассматривать детали еще вид, крупно. Там и таблица переключателей, чтобы получать различные микрошаги и токи на драйвере. 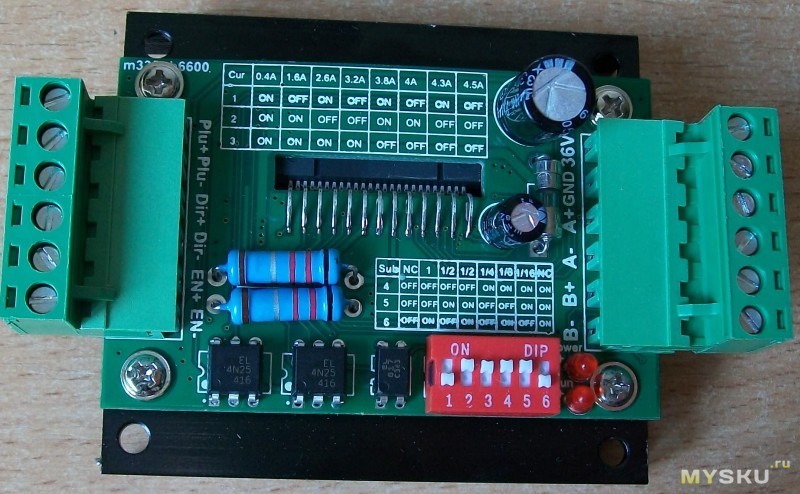
Ну и еще пару вам видов с боку. 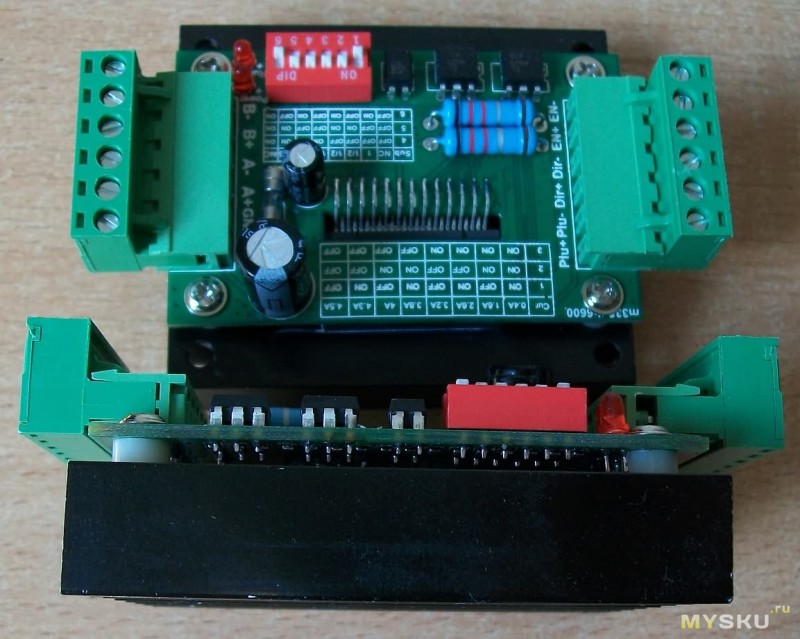
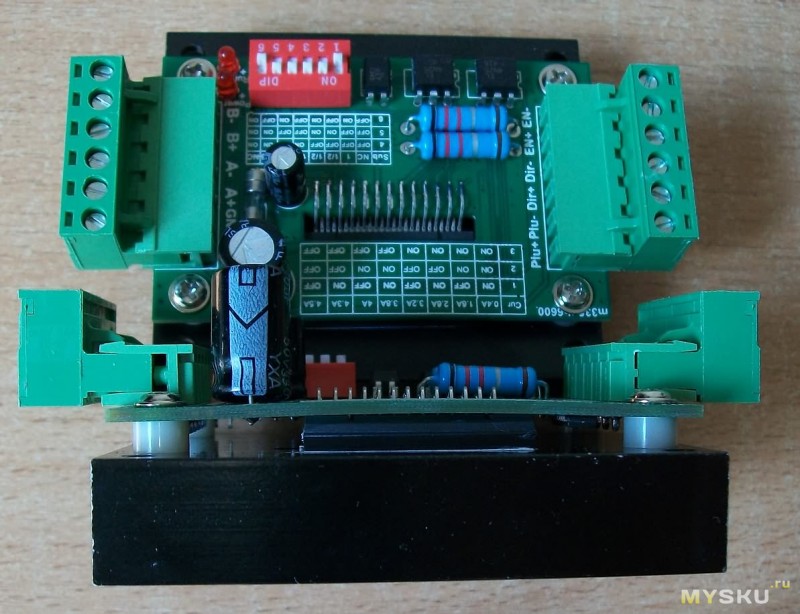
Думаю по самой железке теперь у вас представление есть.
Теорию всё могут и по обзору предыдущему посмотреть и по Инет детали.
Но практика как оказалась, совсем другую картину дает.
Во первых по первым мной заказанным драйверам на TB67S109AFTG, схема подключения которые китайцы дают. То есть вверху №1 Не работает.
Мучился, что только не делал и с подключением и настройками в Масн.
Крутила зараза лишь в одну сторону. Пока не подключил по схеме №2.
Тогда всё стало на свои места и заработало как положено.
Единственно опасаюсь на драйвере ток больше 2.6А давать. Хотя схему охлаждения по своему переделал. Заводская совсем не вдохновила.
Так вот сегодня пробывал и первые драйвера и вторые, на одних и тех же режимах. То есть ток 2.6А и микрошаг 1/16
И здесь все теории и даташиты к чертям просто полетели.
Первый заказанный драйвер, просто шуршит осями. А вот второй на оригинальной TB6600 скрип, дерганье какое то. Чувствуется, что движок как бы рывками крутит.
Вот вам и Термобутерброд. Он то оказался намного лучше.
Конечно ещё нужно поэксперементировать. Но уже видно. Так как перекидывал оси, один шепчет, другой скрипит.
Вот такие пироги. Всем Долгих лет жизни и удачи.
Спрашиваем не стесняемся. Любители минусовать, имейте все же хоть немного совести, прежде чем по кнопке тыкать.
Предупреждение тем кто будет покупать вообще драйвера.
Не знаю почему, но обычно драйвера когда получаете, выставлены на максимальные токи. Поэтому, если не глянете, и быстро подключите движок, то можете Джина получить в виде дымка.
Также переключатели, смотря какого исполнения, совсем не у всех ON вверху находиться, у некоторых наоборот вниз нужно переключить.
Будьте Внимательны. Джин не дремлит.
