


В свободное время я занимаюсь разного рода Arduino проектами. Достаточно часто для реализации того или иного проекта требуется робот — платформа, отвечающая ряду требований: свободное движение, возможность установки дополнительного оборудования и расширения возможностей, а также умеренная стоимость. Вот такую робот- платформу или, просто, гусеничное шасси я и буду делать. Инструкцию, естественно, выкладываю вам на суд.
— Tamiya 70168 сдвоенный редуктор (можно поменять на 70097)
— Tamiya 70100 набор катков и гусениц
— Tamiya 70157 площадка для крепления редуктора (можно заменить на кусочек фанеры 4 мм)
— Небольшие куски листовой оцинковки
— Фанера 10 мм (небольшой кусочек)
— Arduino Nano
— DRV 8833
— LM 317 (стабилизатор напряжения)
— 2 светодиода (красный и зеленый)
— Резисторы 240 Ом,2х 150 Ом, 1.1 кОм
— Конденсатор 10v 1000uF
— 2 однорядных гребенки PLS-40
— 2 разъема PBS-20
— Катушка индуктивности 68мкГн
— 6 NI-Mn аккумулятора 1.2v 1000mA
— Коннектор папа-мама двух контактный на провод
— Провода разных цветов
— Припой
— Канифоль
— Паяльник
— Болтики 3х40, 3х20, гайки и шайбы к ним
— Болтики 5х20, гайки и усиленные гайки к ним
— Дрель
— Сверла по металлу 3 мм и 6 мм
Шаг 1 режем металл.
Для начала нам нужно вырезать из листового металла (лучше оцинковки) вырезать четыре детали. По две детали на гусеницу. По данной развертке вырезаем две детали:
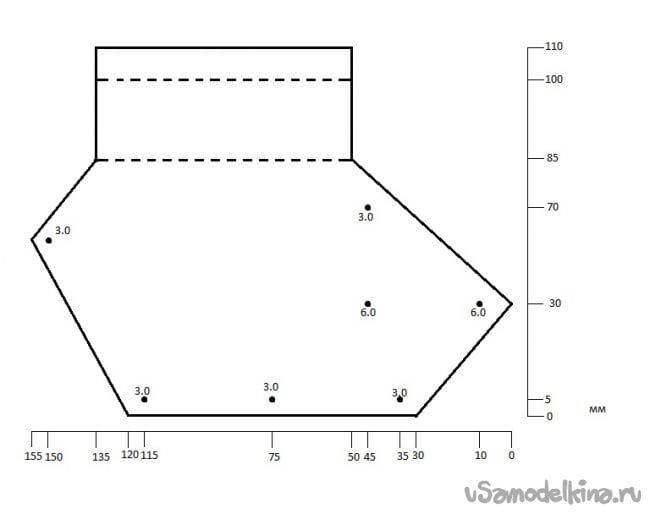
Точками указаны места, где необходимо просверлить отверстия, рядом указан диаметр отверстия. Отверстия 3 мм нужны для навешивания катком, 6 мм – для продевания сквозь них проводов. После резки и сверления нужно напильником пройти все края, не оставляя острых углов. По пунктирным линиям согнуть на 90 градусов. Будьте внимательны! Гнем первую деталь в любую сторону, а вторую гнем в обратную сторону. Они должны быть симметрично согнутыми. Есть еще один нюанс: необходимо просверлить отверстия под саморезы, крепящие наши пластины к основе. Делать это надо, когда будет готова основа. Прикладыаем заготоку на основу и отмечаем места сверления так, чтобы саморезы попадали в центр ДСП. Делаем еще две детали по второй развертке:
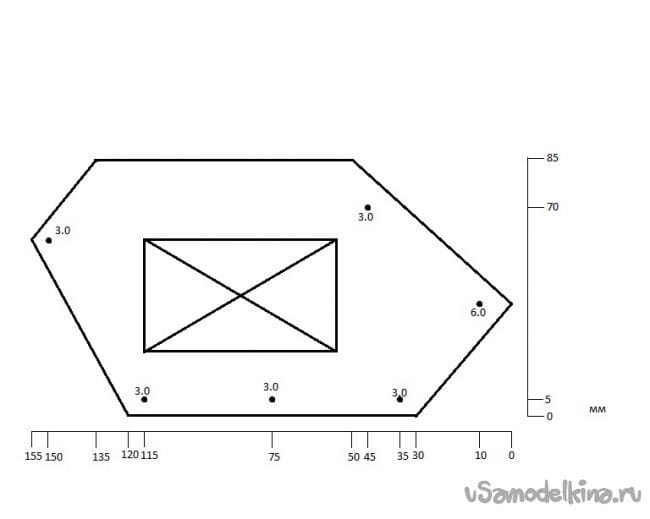
Внутренний прямоугольник надо вырезать. Далее делаем все тоже самое, режем, сверлим, зачищаем. И в итоге получаем заготовки:




Шаг 2 готовим основу.
Собираем редуктор по прилагающийся инструкции. Прикручиваем его на площадку. Если нет площадки вырезаем из фанеры 4 мм прямоугольник 53х80 мм и крепим на нее редуктор. Берем фанеру 10 мм. Вырезаем два прямоугольника 90х53 мм и 40х53 мм. Внутри маленького прямоугольника вырезаем еще один прямоугольник, так чтобы у нас получилась рамка с толщиной стенок 8 мм.
Скручиваем все как показано на фото:


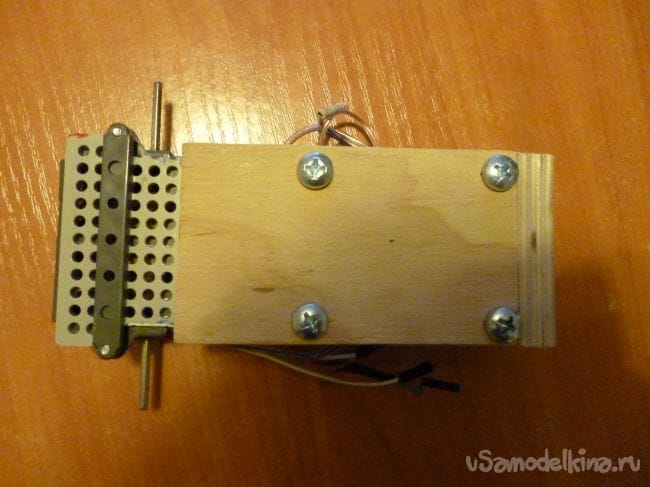

В углах площадки сверли отверстия 6 мм и вставляем в них наши болтики 5х20 сверху накручиваем усиленные гайки. Они нужны для последующего крепления разных механизмов или плат. Для удобства сразу клеим светодиоды:


Шаг 3 электрика.
Для управления будем использовать Arduino Nano. Драйвер двигателей DVR 883. На монтажной плате собираем все по схеме.
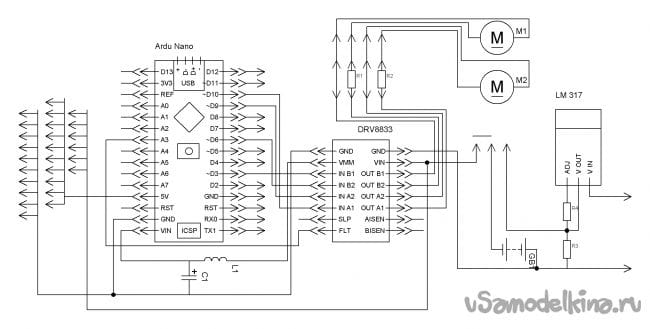
L1 – катушка индуктивности и C1 нужны для стабилизации напряжения Arduino. Резисторы R1 и R2 перед моторами – токоограничивающие, их номинал надо подбирать под конкретные моторчики. У меня нормально работают при 3 Ом. LM317 нужна для заряда аккумуляторов. На вход можно подавать напряжение от 9.5 В до 25 В. R3 – 1.1 кОм R4 – 240 Ом. «Штырьки» слева используются для последующего подключения разного рода устройств ( Bluetooth, модуля связи 433 МГц, IR, Servo и др.). Для питания будем использовать 6 аккумуляторов Ni-Mn 1.2v 1000mA спаянных последовательно и смотанных изолентой.

Шаг 4 собираем основу.
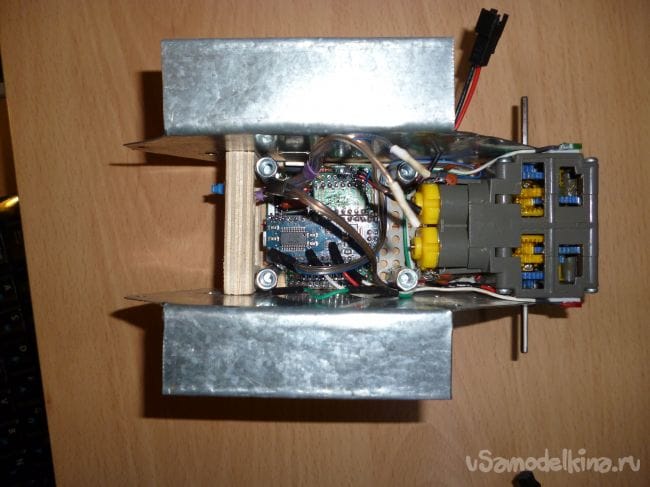
Берем нашу основу, на двусторонний скотч клеим на нее плату. Металлические детали по первой развертке нужно прикрутить на меленькие саморезики к основе по бокам, согнутыми частями наружу. Будьте внимательны прикручивать нужно так, чтобы крайнее 6 мм отверстие надевалось на выходную ось редуктора, низ детали должен быть параллелен основе и симметричен по отношения ко второй такой-же детали. В итоге должно получится:


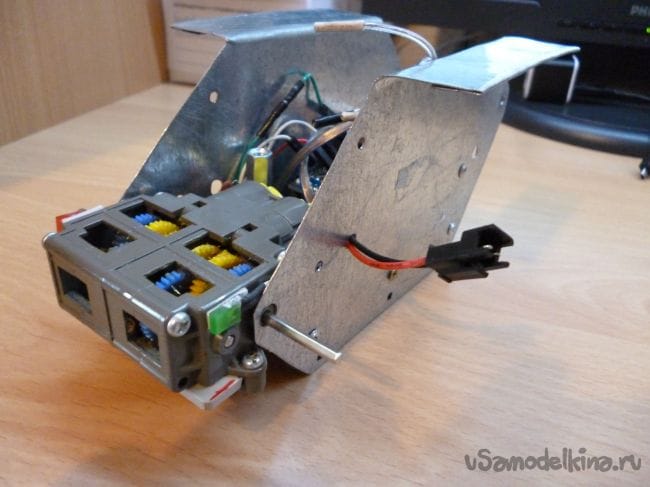
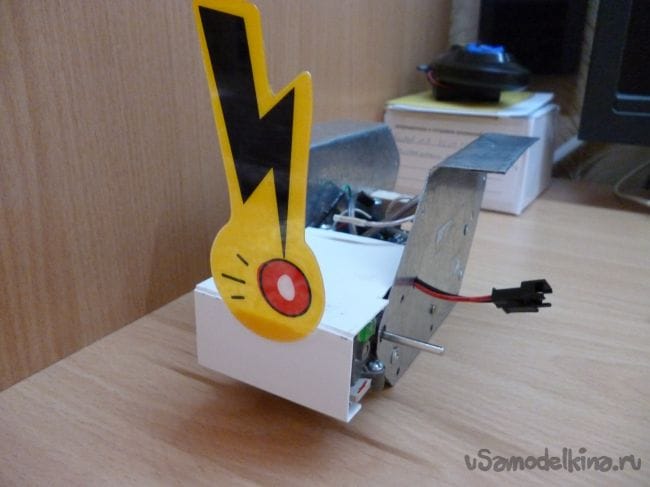
Для придания нашей самоделке эстетичного вида добавим пару деталей. Это необязательно. Из белого пластика вырезаем прямоугольник 110х55 мм и гнем как показано на фото. Хвостик тоже необязателен, но мне понравилось как выглядит и прикольно трясется при движении:


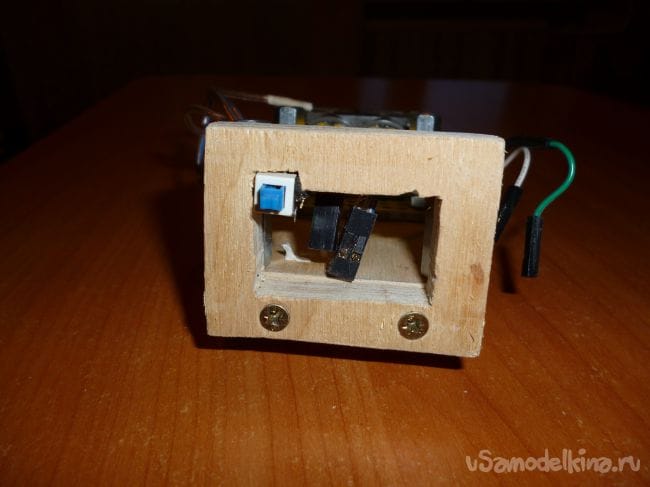
Эта крышка прикрывает редуктор, чтобы в него не попадала грязь, да и шумит он так меньше. Далее тоже из белого пластика вырезаем прямоугольник 52х41 мм. Делаем отверстия для подключения Arduino и кнопки выключения как на фото:
Клеим все это на двусторонний скотч:

Наклейка для красоты.
Эти две детали можно изготовить практически из любого материала, который есть под руками. Это может быть толстый картон (который потом можно раскрасить), ДВП, тонкая фанера или листик пластика любого цвета. Не забываем про аккумуляторы. Приклеим их на двусторонний скотч на правой металлической части основы:

Шаг 5 гусеницы.
Здесь нам понадобятся наши заготовки по второй развертке. В 3 мм отверстия вставляем болтики с полуцилиндрической головкой 3х20. Надеваем шайбы и накручиваем гайки:

Перед катками необходимо надеть шайбы. Я не поленился и заказал пластиковые шайбы. Можно использовать и обычные металлические, но тогда наши гусеницы получаются очень шумными. После катков накручиваем гайки, не затягивая, а так чтобы катки свободно вращались.

Накидываем на катки резиновые гусеницы. Надеваем пластину вместе с катками на основу, смотря чтобы болтики попадали в отверстия. И затягиваем гайки. Мы получаем почти готовое гусеничное шасси:
В свободное время я занимаюсь разного рода Arduino проектами. Достаточно часто для реализации того или иного проекта требуется робот — платформа, отвечающая ряду требований: свободное движение, возможность установки дополнительного оборудования и расширения возможностей, а также умеренная стоимость. Вот такую робот- платформу или, просто, гусеничное шасси я и буду делать. Инструкцию, естественно, выкладываю вам на суд.
— Tamiya 70168 сдвоенный редуктор (можно поменять на 70097)
— Tamiya 70100 набор катков и гусениц
— Tamiya 70157 площадка для крепления редуктора (можно заменить на кусочек фанеры 4 мм)
— Небольшие куски листовой оцинковки
— Фанера 10 мм (небольшой кусочек)
— Arduino Nano
— DRV 8833
— LM 317 (стабилизатор напряжения)
— 2 светодиода (красный и зеленый)
— Резисторы 240 Ом,2х 150 Ом, 1.1 кОм
— Конденсатор 10v 1000uF
— 2 однорядных гребенки PLS-40
— 2 разъема PBS-20
— Катушка индуктивности 68мкГн
— 6 NI-Mn аккумулятора 1.2v 1000mA
— Коннектор папа-мама двух контактный на провод
— Провода разных цветов
— Припой
— Канифоль
— Паяльник
— Болтики 3х40, 3х20, гайки и шайбы к ним
— Болтики 5х20, гайки и усиленные гайки к ним
— Дрель
— Сверла по металлу 3 мм и 6 мм
Шаг 1 режем металл.
Для начала нам нужно вырезать из листового металла (лучше оцинковки) вырезать четыре детали. По две детали на гусеницу. По данной развертке вырезаем две детали:
Точками указаны места, где необходимо просверлить отверстия, рядом указан диаметр отверстия. Отверстия 3 мм нужны для навешивания катком, 6 мм – для продевания сквозь них проводов. После резки и сверления нужно напильником пройти все края, не оставляя острых углов. По пунктирным линиям согнуть на 90 градусов. Будьте внимательны! Гнем первую деталь в любую сторону, а вторую гнем в обратную сторону. Они должны быть симметрично согнутыми. Есть еще один нюанс: необходимо просверлить отверстия под саморезы, крепящие наши пластины к основе. Делать это надо, когда будет готова основа. Прикладыаем заготоку на основу и отмечаем места сверления так, чтобы саморезы попадали в центр ДСП. Делаем еще две детали по второй развертке:
Внутренний прямоугольник надо вырезать. Далее делаем все тоже самое, режем, сверлим, зачищаем. И в итоге получаем заготовки:
Шаг 2 готовим основу.
Собираем редуктор по прилагающийся инструкции. Прикручиваем его на площадку. Если нет площадки вырезаем из фанеры 4 мм прямоугольник 53х80 мм и крепим на нее редуктор. Берем фанеру 10 мм. Вырезаем два прямоугольника 90х53 мм и 40х53 мм. Внутри маленького прямоугольника вырезаем еще один прямоугольник, так чтобы у нас получилась рамка с толщиной стенок 8 мм.
Скручиваем все как показано на фото:
В углах площадки сверли отверстия 6 мм и вставляем в них наши болтики 5х20 сверху накручиваем усиленные гайки. Они нужны для последующего крепления разных механизмов или плат. Для удобства сразу клеим светодиоды:
Шаг 3 электрика.
Для управления будем использовать Arduino Nano. Драйвер двигателей DVR 883. На монтажной плате собираем все по схеме.
L1 – катушка индуктивности и C1 нужны для стабилизации напряжения Arduino. Резисторы R1 и R2 перед моторами – токоограничивающие, их номинал надо подбирать под конкретные моторчики. У меня нормально работают при 3 Ом. LM317 нужна для заряда аккумуляторов. На вход можно подавать напряжение от 9.5 В до 25 В. R3 – 1.1 кОм R4 – 240 Ом. «Штырьки» слева используются для последующего подключения разного рода устройств ( Bluetooth, модуля связи 433 МГц, IR, Servo и др.). Для питания будем использовать 6 аккумуляторов Ni-Mn 1.2v 1000mA спаянных последовательно и смотанных изолентой.
Шаг 4 собираем основу.
Берем нашу основу, на двусторонний скотч клеим на нее плату. Металлические детали по первой развертке нужно прикрутить на меленькие саморезики к основе по бокам, согнутыми частями наружу. Будьте внимательны прикручивать нужно так, чтобы крайнее 6 мм отверстие надевалось на выходную ось редуктора, низ детали должен быть параллелен основе и симметричен по отношения ко второй такой-же детали. В итоге должно получится:
Для придания нашей самоделке эстетичного вида добавим пару деталей. Это необязательно. Из белого пластика вырезаем прямоугольник 110х55 мм и гнем как показано на фото. Хвостик тоже необязателен, но мне понравилось как выглядит и прикольно трясется при движении:
Эта крышка прикрывает редуктор, чтобы в него не попадала грязь, да и шумит он так меньше. Далее тоже из белого пластика вырезаем прямоугольник 52х41 мм. Делаем отверстия для подключения Arduino и кнопки выключения как на фото:
Клеим все это на двусторонний скотч:
Наклейка для красоты.
Эти две детали можно изготовить практически из любого материала, который есть под руками. Это может быть толстый картон (который потом можно раскрасить), ДВП, тонкая фанера или листик пластика любого цвета. Не забываем про аккумуляторы. Приклеим их на двусторонний скотч на правой металлической части основы:
Шаг 5 гусеницы.
Здесь нам понадобятся наши заготовки по второй развертке. В 3 мм отверстия вставляем болтики с полуцилиндрической головкой 3х20. Надеваем шайбы и накручиваем гайки:
Перед катками необходимо надеть шайбы. Я не поленился и заказал пластиковые шайбы. Можно использовать и обычные металлические, но тогда наши гусеницы получаются очень шумными. После катков накручиваем гайки, не затягивая, а так чтобы катки свободно вращались.
Накидываем на катки резиновые гусеницы. Надеваем пластину вместе с катками на основу, смотря чтобы болтики попадали в отверстия. И затягиваем гайки. Мы получаем почти готовое гусеничное шасси:
В этом проекте мы построим движущегося робота (платформу на гусеницах), который может обнаруживать и избегать препятствия. Он использует 2 инфракрасных датчика, представляющих собой пару излучающий ИК-светодиод и ИК-приемник, смонтированную в его передней левой и передней правой сторонах. ШИМ контроллер тут используется для управления скоростью моторов.
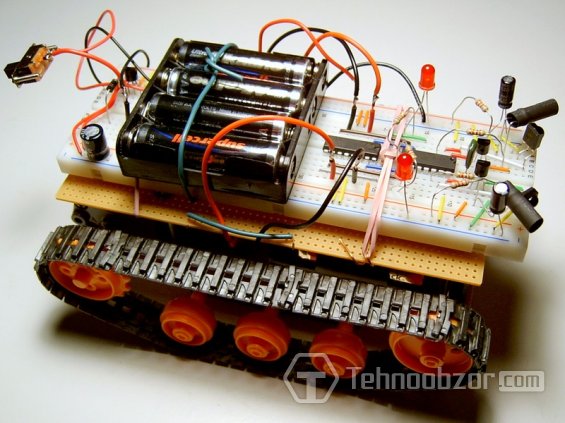
ИК-датчики установлены под углом 90° друг от друга, чтобы свести к минимуму интенсивность отраженных сигналов, поступающих на приемник из другой пары. Для этой же цели в ИК светодиоды поставить в короткие черные пластиковые трубочки.
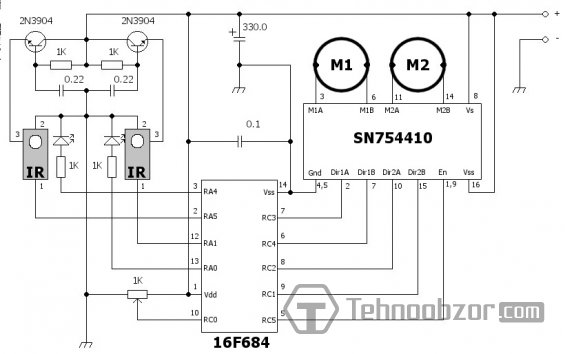
Схема гусеничного робота
Питание и преобразователь
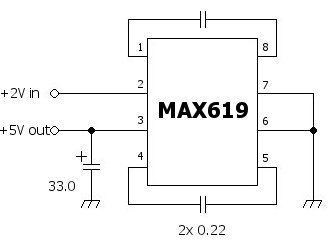
В принципе даже напряжения 3 В от 2-х батареек хватает чтобы двигаться довольно быстро. Однако, поскольку дополнительная электроника используется, чтобы изменить направление вращения двигателя, который потребляет изрядное количество тока от батареи, двигатель еле вращается. Поэтому в итоге 4xAA использовались для питания. Если всё-же нужно питать от 3 В или литиевой батарейки 3,7 В — для нормальной работы придётся использовать DC-DC преобразователь. Есть много вариантов, например MAX619 по схеме выше.
Драйвер двигателей схема
Драйвер электромотора на SN754410, хотя его и недостаточно для низковольтного применения. Так как он включает в себя биполярные транзисторы, они имеют падение напряжение не менее 0,7 В на каждом. Это значит, что моторы на самом деле получат на 1,4 вольта меньше от батареи, которое составляет около 50% потерь при 3 В питании. Другой недостаток этого решения заключается в том, что она нуждается в обширной охлаждения. Каждый из моторов потребляет около 200 мА, и микросхема рассеивает 2·1,4 В х 200 мА = 0,56 Вт тепла — нужен теплоотвод, что так же не способствует экономии батареи.
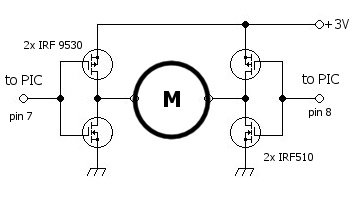
Еще одним способом создания драйвера двигателя является использование МОП-транзисторов. Эти устройства свободны от указанных выше ограничений на биполярных транзисторах. Тут использованы N-канальные МОП-транзисторы типа IRF510, чье сопротивление во включенном состоянии составляет 0,5 Ом. Поэтому они имеют только 0,5 Ом х 0,25 А = 0.125 В падение напряжения, которое является незначительным. В этом режиме транзистор рассеивает только (0.5 Ом)2 х 0,25 А = 0.06 Вт и может работать без теплоотвода. Лучшим выбором будет использование IRF520 чей канал имеет сопротивление 0.2 Ома.
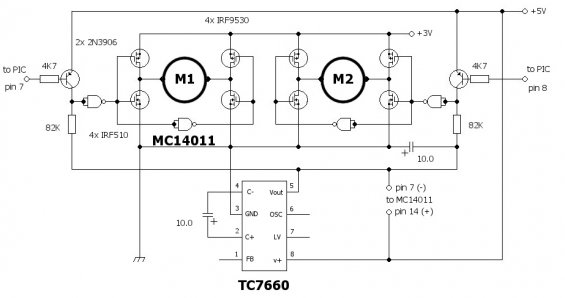
Транзисторы снабжены ограничивающими напряжение диодами. Для решения проблемы низкого питания добавлен DC-DC преобразователь на TC7660, что инвертирует 3 В в 5 В.